Le logiciel ADMA-PP est un logiciel de traitement et correction des données des centrales inertielles pour l’optimisation des essais de la dynamique véhicule.
Logiciel de traitement et correction des centrales inertielles
Le logiciel de post-traitement ADMA-PP fusionne les données inertielles ADMA, les données GNSS et des informations supplémentaires externes en rejeu des données.
En utilisant cette méthode, il est possible de traiter et d’optimiser les données sans les contraintes introduites par le filtre de Kalman, en temps réel et la dérive inhérente à la perte de réception des signaux GNSS.
La précision et l’intégrité des données sont optimisées, les données de correction RTK peuvent être appliquées sans discontinuité de traitement. Un calcul de distance relative de 1 cm (1 σ) entre plusieurs véhicules est possible avec correction RTK ou sans, en utilisant les informations de correction des stations de base.
ADMA
La centrale ADMA (Automotive Dynamic Motion Analyzer) est une unité de mesure inertielle de haute précision compatible DGNSS utilisée pour valider les systèmes d’aide à la conduite (ADAS) et de conduite autonome.
La précision du système ADMA est cependant limitée par la qualité des gyroscopes et accéléromètres utilisés en interne de la centrale et la durée de perte des signaux GNSS. Cependant, les performances du système peuvent être grandement améliorées grâce au post-traitement.
ADMA PP
Le logiciel ADMA-PP permet de réduire la dérive de la solution de positionnement pendant les pertes des signaux GNSS et fournit une solution d’analyse des données des centrales inertielles en continu.
Pour y parvenir, l’ADMA-PP utilise des algorithmes de calcul avancés en utilisant les données d’entrée dans le domaine temporel et en analysant à la fois les données antérieures et ultérieures puis en combinant les résultats analysés. Le logiciel ADMA PP est également compatible avec les données de correction RTK2 ( aussi appelé RINEX ) accessibles en post traitement. Les fonctions d’un filtre de Kalman et de décodage des signaux GNSS sont intégrées à ce logiciel.
L’étape d’initialisation des centrales inertielles pour configurer le filtre de Kalman est particulièrement difficile sur la voie publique. Le logiciel ADMA PP rend cette étape avant l’acquisition des données non obligatoire.
L’utilisation des données RTK durant les essais sur piste ou en roulage urbain via des modems RF ou des stations de base rendant l’instrumentation véhicule parfois très complexe n’est pas nécessaire avec le logiciel ADMA PP. Ces informations sont accessibles ultérieurement en rejeu en utilisant des données de correction RTK offline.
Le logiciel ADMA PP est donc une solution idéale afin d’optimiser l’analyse les données issues des
centrales inertielles en essai ou roulage véhicule en cas de perte ou d’absence des signaux GNSS. Une précision de 1 cm pour des mesures de positionnement ou relatives entre les véhicules peut être atteinte.
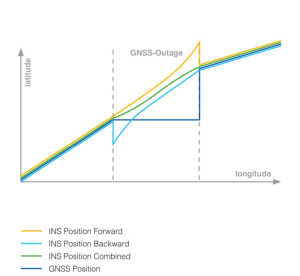
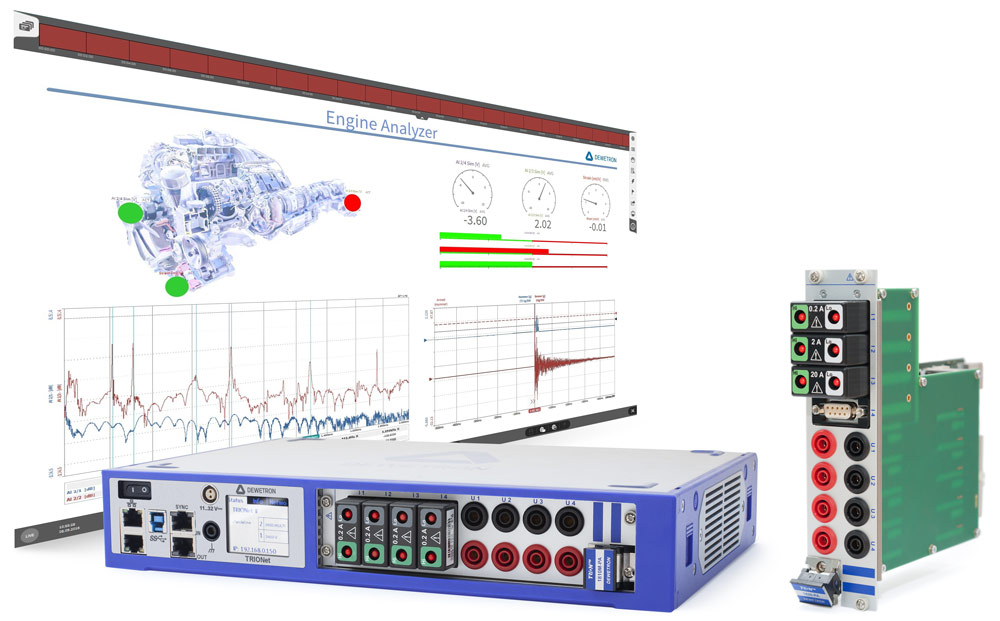
Figure 1: Illustration de la compensation des données inertielles en cas de perte GNSS
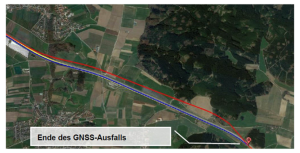 Figure 2: Exemple de tracé sans ( bleu ) et avec ( rouge ) perte du signal GNSS et en jaune après correction du logiciel ADMA PP
Figure 2: Exemple de tracé sans ( bleu ) et avec ( rouge ) perte du signal GNSS et en jaune après correction du logiciel ADMA PP
En savoir plus sur DEWETRON SERVICES
Si vous souhaitez en savoir plus sur DEWETRON SERVICES et nos domaines d’application, n’hésitez pas à visiter notre site Web. Vous y trouverez, des livres blancs ... De plus, nous sommes toujours heureux d’avoir de vos nouvelles par l’onglet contact sur notre site web.