













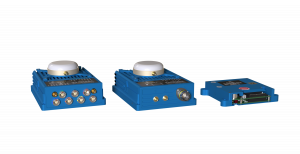









ADMA-Micro : Notre plus petite unité de navigation GNSS inertielle, ultra-précise pour tests et applications ADAS


Applications principales
- Tests de véhicules autonomes (AV)
- Evaluation de systèmes avancés d’assistance à la conduite (ADAS)
- Tracking des participants vulnérables (VRU) comme piétons et cyclistes
- SLAM (localisation et cartographie simultanées)
- Mesure dynamique et analyse de performance véhicule
- Validation de fonctions de sécurité prédictives (radars, lidars, caméras)
C’est avec plus de 25 ans d’expérience, que GeneSys évolue dans les systèmes de navigation inertielle. En effet l’ADMA-Micro est un système INS assisté par GNSS à part entière, combiné à un filtre de Kalman avancé.
Une grande flexibilité et une interface web intégrée permettent des flux de travail rapides et personnalisés. Une large gamme de solutions logicielles gratuites, comme la bibliothèque Data Reader pour le décodage du flux de données ADMAnet ou le pilote ROS, permettent une intégration facile de cette solution de mesure.
Caractéristiques principales
- Système GNSS/INS compact avec précision centimétrique (RTK)
- Filtre de Kalman avancé pour fusion précise des données
- Mesure en temps réel de position, vitesse, angles jusqu’à 200 Hz
- Données avec latence < 1 msec
- Prise en charge d’une double antenne pour une orientation très précise
- Capacité multi‑GNSS pour une fiabilité maximale
- Interface web intégrée pour une configuration aisée
- Prêt pour la production en série
Variantes et connecteurs
- Version Standard : boîtier étanche avec 3 connecteurs Lemo
- Version OEM : boîtier compact avec 2 connecteurs Samtec pour intégration système
Logiciels et intégration
ADMA‑Micro inclut une interface web intégrée pour configuration rapide, une Data Reader Library pour décoder les flux ADMAnet, et des pilotes ROS1 & ROS2 pour intégration dans des systèmes de tests et véhicules autonomes.
Données techniques
| SYSTÈME COMPLET | |
| Constellations GNSS | GPS L1, L2; GLONASS L1, L2; BeiDou B1, B2; Galileo E1, E5 |
| Double antenne | Facultatif |
| Précision de position*2 | 0,01 / 0,20 / 0,60 / 1,20 / 1,50 m |
| Plage de mesure d’angle roulis/tangage/lacet | 60° / 60° / ±180° |
| Précision de la vitesse (RMS)*3 | 0,06 km/h RMS |
| Débit de données | 100 Hz / 200 Hz |
| Latence de calcul | 1 ms |
| Filtre Kalman | Fusion avancée GNSS / IMU pour précision maximale |
| Supports multi‑GNSS | GPS, GLONASS, BeiDou, Galileo |
| CAPTEURS – GYROSCOPIES | |
| Technologie des capteurs | 3 gyroscopes MEMS |
| Plage de mesure | ±450 °/s |
| Résolution de sortie des données | 0,0001 °/s |
| Répétabilité du biais typ. (1σ) | 0,14 °/s axe y et z; 1,4 °/s axe x |
| Biais en cours d’exécution typique | 2,7 °/h axe x; 2,2 °/h axe y; 1,6 °/h axe z |
| Bruit (marche aléatoire) typ. | 0,15 °/√h axe x et y; 0,2 °/√h axe z |
| Facteur d’échelle | n/A |
| Bande passante du capteur | Axes x et y : 480 Hz; axe z : 590 Hz |
| CAPTEURS – ACCÉLÉROMÈTRES | |
| Technologie des capteurs | 3 accéléromètres MEMS |
| Plage de mesure*5 | ±15 g |
| Résolution de sortie des données | 0,0001 g |
| Typ. de répétabilité du biais | 15 mg |
| Biais en cours d’exécution typique (1σ) | 12,75 µg axe x et y; 13,66 µg axe z |
| Bruit (marche aléatoire) typ. | 90 µg/√Hz axe x et y; 75 µg/√Hz axe z |
| Facteur d’échelle (1σ) | n/A |
| Bande passante du capteur | 750 Hz |
| INTERFACES | |
| Ethernet | 1 entrée/sortie 1 Gbit, configuration, mise à jour firmware, sortie données robot, optionnel DGNSS |
| PEUT | 1 port CAN 2b, sortie données 1 Mbit/s, entrée*1 |
| En série | 1 récepteur GNSS RS232; entrée correction DGNSS; IPS |
| Entrée numérique/analogique | 2 entrées numériques/analogiques (16 bits), ex: fréquence, déclenchement frein |
| Sortie numérique | 2 sorties de signal, ex: PPS, impulsions PPD |
| Type de connecteur | Samtec / Lemo |
| GNSS | 2 connecteurs antenne GNSS SMA |
| Logiciels / Intégration | Webinterface, Data Reader Library, pilotes ROS1 & ROS2 |
| QUINCAILLERIE / DIVERS | |
| Dimensions (LxHxP) | OEM: 78x61x26,9 mm; Standard: 93×71,5×32,5 mm |
| Mémoire interne | Jusqu’à 64 Go (les deux versions) |
| Poids | OEM: 0,116 kg; Standard: 0,229 kg |
| Alimentation électrique | OEM: 5 V CC, 7,5 W; Standard: 9–32 V CC, 7,5 W |
| Température de fonctionnement | -20 °C à +75 °C |
| Classe de protection | OEM: IP20; Standard: IP67 |
| *1 Optionnel | *2 Selon conditions GNSS et modèle licence | *3 Valeurs typiques avec filtre Kalman | *5 Plage d’étalonnage 0–200 °/s | |